Selamat datang di Blog SITROTIS (Sistem Kendali Otomatis) blog yang berisi tentang dunia teknik kontrol otomatis yang akan menambah pengetahuan kalian. Pada pembahasan yang ketiga ini penulis akan membahas tentang . Untuk Informasi lebih lanjut silahkan baca artikel dibawah ini.

Gambar 1. Kerangka Kerja PID
(Sumber: Youtube)
PID (Propotional Integral Derivative controller)
PID berasal dari singkatan bahasa inggris (Proportional Integral Derivative controller). Kontroller PID adalah kontroler dengan memakai prosedur umpan balik yang kebanyakan dipakai pada sistem kontrol industri. Sebuah kontroler PID secara terus menerus menghitung nilai problem atau nilai kesalahan sebagai beda antara setpoint yang diinginkan dan variabel proses terukur. Kontroler menjajal buat mengecilkan nilai kesalahan setiap waktu dengan cara mensetting variabel kontrol, contohnya pada posisi keran kontrol, damper, atau daya pada elemen pemanas, ke nilai baru yang dipastikan oleh penjumlahan:

Kp, Ki, dan Kd, jika semuanya bernilai positif (+), menandakan koefisien pada term proporsional, integral, dan derivatif, secara berurutan (P, I, dan D). Pada desain seperti ini:
a. P berkewajiban sebagai nilai kesalahan saat ini. Contohnya, jika nilai kesalahan besar dan positif, sama dengan keluaran kontrol juga bernilai besar dan positif.
b. I berkewajiban sebagai nilai kesalahan sebelumnya. Contoh, jika output bernilai kurang besar, maka tingkat problem atau tingkat kesalahan akan terakumulasi secara terus menerus, dan kontroler akan bereaksi (merespon) dengan output lebih tinggi.
c. D berkewajiban sebagai kemungkinan nilai kesalahan yang akan datang, berdasarkan pada nilai rate dalam perubahan setiap waktu.
Dari penjelasan keterangan rumus di atas. Dapat disimpulkan pada gambar diagram alir (diagram blog) dibawah ini:
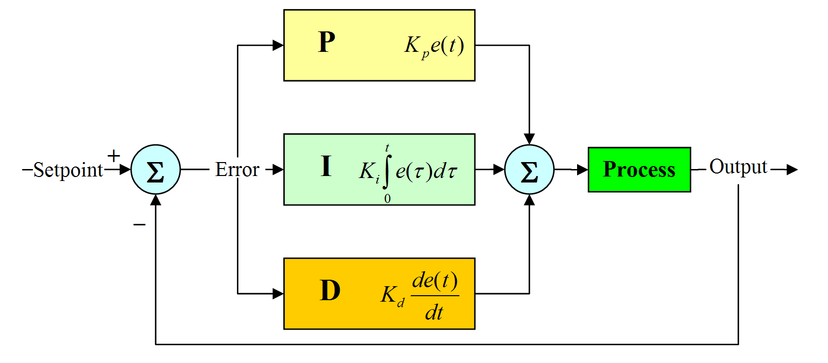
Gambar 2. Blok diagram PID
(Sumber: wikipedia)
Karena kontroler PID hanya mengandalkan variabel proses terukur, bukan pengetahuan mengenai prosesnya, maka dapat secara luas digunakan. Dengan aklimitasi (tuning) ketiga parameter model, kontroler PID bisa mencukupi kebutuhan proses. Respon kontroler bisa diterangkan dengan bagaimana responnya terhadap problem, besarnya overshoot dari setpoint, dan derajat osilasi sistem. penggunaan algoritme PID tidak menanggung kontrol optimum sistem atau bahkan kesetimbangannya.
Beberapa aplikasi bisa jadi hanya memakai satu atau dua term berfungsi untuk memberikan kontrol sistem yang sesuai dengan rancangan. Hal ini dapat digapai dengan cara mengontrol parameter yang lain menjadi nol. Kontroler PID bisa sebagai kontroler PI, PD, P atau I tergantung aktivitas apa yang dipakai. Kontroler PI kebanyakan dikenal sebagai kontroler paling umum.
Untuk sistem waktu diskrit, biasanya sering digunakan PSD (proportional summation difference).
Beberapa aplikasi bisa jadi hanya memakai satu atau dua term berfungsi untuk memberikan kontrol sistem yang sesuai dengan rancangan. Hal ini dapat digapai dengan cara mengontrol parameter yang lain menjadi nol. Kontroler PID bisa sebagai kontroler PI, PD, P atau I tergantung aktivitas apa yang dipakai. Kontroler PI kebanyakan dikenal sebagai kontroler paling umum.
Untuk sistem waktu diskrit, biasanya sering digunakan PSD (proportional summation difference).
Komponen kontrol PID ini terdiri dari tiga jenis antara lain:
1. Kontrol Proporsional
Kontrol P
(s) = kp, dengan keterangan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan keterangan Kp adalah Konstanta Proporsional. simbol Kp berlaku sebagai Gain (penguat) saja tidak memberikan dampak dinamik ke kinerja kontroler. Penggunaan kontrol P mempunyai banyak keterbatasan karena kontrol, memiliki sifat yang tidak dinamik ini. Meskipun demikian dalam aplikasi-aplikasi dasar yang simple. Kontrol P ini bisa cukup mampu untuk memperbaiki respon transien khususnya rise time dan setting time. Pengontrol proporsional mempunyai keluaran atau output yang sebanding/proporsional dengan besarnya sinyal kesalahan/error (selisih antara besaran yang sesuai selera dengan harga aktualnya).
Ciri-ciri pengontrol proporsional :
Ciri-ciri pengontrol proporsional :
1. Jika nilai Kp kecil, pengontrol proporsional hanya bisa melakukan koreksi kesalahan yang kecil, yang akhirnya hanya menghasilkan tanggapan sistem yang lambat (menambah rise time).
2. Jika nilai Kp dinaikkan, reaksi sistem akan semakin cepat sampai keadaan yang sangat pas (mengurangi rise time).
3. Namun jika nilai Kp diperbesar sampai mencapai harga yang berlebihan, akan memperoleh sistem bekerja tidak stabil atau tanggapan sistem akan berosilasi.
4. Nilai Kp dapat disetting dengan demikian, sehingga mengurangi steady state error, namun tidak menghilangkannya.
2. Kontrol Integratif
Pengontrol Integral mempunyai fungsi untuk menghasilkan respon sistem yang memiliki kesalahan (error) keadaan nol (Error Steady State = 0 ). Jika sebuah pengontrol tidak mempunyai unsur integrator, pengontrol proporsional tidak mampu menjamin keluaran sistem dengan kesalahan (error) keadaan mantapnya nol.
Apabila G(s) itu kontrol I maka u adalah sebagai u(t)=[integral e(t)dT]Ki dengan Ki merupakan konstanta Integral, dan dari persamaan di atas, G(s) bisa dijabarkan sebagai u=Kd.[delta e/delta t]
Pengontrol Integral mempunyai fungsi untuk menghasilkan respon sistem yang memiliki kesalahan (error) keadaan nol (Error Steady State = 0 ). Jika sebuah pengontrol tidak mempunyai unsur integrator, pengontrol proporsional tidak mampu menjamin keluaran sistem dengan kesalahan (error) keadaan mantapnya nol.
Apabila G(s) itu kontrol I maka u adalah sebagai u(t)=[integral e(t)dT]Ki dengan Ki merupakan konstanta Integral, dan dari persamaan di atas, G(s) bisa dijabarkan sebagai u=Kd.[delta e/delta t]
Apabila e(T) mendekati konstan (tidak nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Apabila e(T) mendekati nol sehingga efek kontrol I ini semakin kecil. Kontrol I bisa memperbaiki bahkan menghilangkan tanggapan steady-state, tetapi pemilihan Ki yang salah dapat menyebabkan tanggapan transien yang tinggi bisa menyebabkan ketidakstabilan sistem. Pemilihan Ki yang terlalu tinggi justru bisa mengakibatkan output berosilasi karena bisa menambah orde pada sistem.
Output pengontrol ini hasil penjumlahan yang berkepanjangan dari perubahan inputnya. Jika sinyal error tidak mengalami perubahan, maka output akan menjaga keadaan seperti sebelum terjadinya perubahan input. Sinyal output pengontrol integral adalah luas bidang yang dibentuk oleh kurva kesalahan / error.
Ciri-ciri pengontrol integral :
1. Output pengontrol integral membutuhkan selang waktu tertentu, sehingga pengontrol integral lebih condong tanggapannya diperlambat.
2. Pada saat sinyal kesalahan / error berharga nol, maka output pengontrol akan bertahan pada nilai sebelumnya.
3. Jika sinyal kesalahan/error tidak berharga nol, output/keluaran akan menghasilkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan/error dan nilai Ki.
4. Konstanta integral Ki yang memiliki harga nilai besar bisa mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki bisa memperoleh peningkatan osilasi dari output/keluaran sinyal pengontrol.
3. Kontrol Derivatif
Keluaran pengontrol diferensial mempunyai sifat seperti suatu operasi derivatif. Perubahan yang mendadak pada masukan pengontrol akan membuat perubahan yang sangat besar dan cepat. Ketika input/masukannya tidak mengalami perubahan, maka output/keluaran pengontrol juga tidak mengalami perubahan, sedangkan apabila sinyal input / masukan berubah mendadak dan melonjak naik (berbentuk fungsi step), output menghasilkan sinyal berbentuk impuls. Apabila sinyal input (sinyal masukkan) berubah naik secara perlahan (fungsi ramp), outputnya (sinyal keluaran) justru seperti fungsi step yang besar magnitudenya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan faktor konstanta Kd.
Sinyal kontrol u yang didapatkan oleh kontrol D bisa dinyatakan sebagai G(s)=s.Kd. Dari persamaan di atas, bisa didapatkan bahwa sifat dari kontrol D ini dalam konteks “kecepatan” atau rate dari kesalahan (error). Dengan sifat ini ia dapat dipakai untuk memperbaiki respon transien dengan memprediksi error atau kesalahan yang akan terjadi. Kontrol Derivative bisa berubah ketika ada perubahan pada error. Sehingga saat error statis, kontrol ini akan diam tidak ada reaksi, hal ini pula yang membuat kontroler Derivative tidak bisa dipakai sendiri
Ciri-ciri pengontrol derivatif :
1. Pengontrol tidak bisa memberikan keluaran jika tidak ada perubahan pada masukannya (berupa perubahan sinyal kesalahan)
2. Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan pengontrol tergantung pada nilai Kd dan laju perubahan sinyal kesalahan.
3. Pengontrol diferensial memiliki suatu ciri untuk mendahului, sehingga pengontrol ini bisa mendapatkan koreksi yang signifikan sebelum pembangkit error/kesalahan menjadi sangat besar. Jadi pengontrol diferensial bisa waspada pembangkit error/kesalahan, memberikan aktivitas yang bersifat korektif dan condong meningkatkan stabilitas sistem.
4. Dengan meningkatkan nilai Kd, dapat menaikkan stabilitas sistem dan menurunkan overshoot.
Berdasarkan ciri-ciri pengontrol di atas, pengontrol diferensial yang paling umum dipakai untuk mempercepat respon awal suatu sistem, tetapi tidak memperkecil error pada keadaan berkelanjutan. Aktivitas pengontrol diferensial biasanya tidak tetap pada lingkup yang sempit, yaitu pada periode peralihan. Oleh sebab itu pengontrol diferensial tidak pernah dipakai tanpa ada kontroler lainnya.
Efek dari ketiga pengontrol diatas pada sistem lup tertutup disimpulkan pada table berikut ini :

Tujuan dari Elemen-elemen pengontrol P, I dan D secara keseluruhan:
1. mempercepat reaksi sebuah sistem mencapai set point-nya
2. menghilangkan offset
3. menghasilkan perubahan awal yang besar dan mengurangi overshoot.
Penjelasan atau contohnya Kendali P.I.D sebagai berikut :
Bisa diberikan contoh pada lift, fungsi kendali / kontrolnya adalah bagaimana menciptakan kecepatan lift ketika dinaiki oleh jumlah orang yang berbeda (secara logika ketika hanya 1 orang kecepatan tinggi dan ketika orangnya banyak maka kecepatan menurun) oleh karena itu, disini fungsi kendali walau jumlah barapapun kecepatan tetap sama,
Misalnya kita analogikan dengan kecepatan kereta (analogikan seperti kecepatan konstan 80KM/jam)
Maka :
Bisa diberikan contoh pada lift, fungsi kendali / kontrolnya adalah bagaimana menciptakan kecepatan lift ketika dinaiki oleh jumlah orang yang berbeda (secara logika ketika hanya 1 orang kecepatan tinggi dan ketika orangnya banyak maka kecepatan menurun) oleh karena itu, disini fungsi kendali walau jumlah barapapun kecepatan tetap sama,
Misalnya kita analogikan dengan kecepatan kereta (analogikan seperti kecepatan konstan 80KM/jam)
Maka :
Kendali P, berfungsi mempercepat dengan start dari kecepatan 0-80 KM/H,
Kendali I, berfungsi menjaga kecepatan ketika mencapai 80 KM/H supaya tidak terjadi kenaikan atau penurunan mendadak
Kendali D, berfungsi menjaga kestabilan kecepatan 80km/h selama kereta berjalan.
Demikianlah artikel kali ini tentang PID. semoga bermanfaat untuk anda semua dan ditunggu pembahasan materi berikutnya.






EmoticonEmoticon